1. Пояснение использования
Двигатель выбирается на базе требуемого крутящего момента, который определяется применением, например, привод движения, подъемный привод, привод подачи или привод главного шпинделя. Также должны быть продуманы редукторы для преобразования движения или согласования скорости и крутящего момента двигателя с режимом нагрузки.
Кроме нагружающего момента, который определяется использованиями, предусматриваются следующие механические характеристики двигателя, среди этих необходимо рассчитать и крутящий момент:
- Подвижные массы
- Диаметр приводного колеса
- Шаг ходового винта, передаточные числа
- Данные фрикционной стойкости
- Механический КПД
- Траектории перемещения
- Максимальная скорость
- Максимальное ускорение и макс. торможение
- Время цикла
2. Определение граничных условий и интеграция в автоматизированную систему
Вы должны решить, какие двигатели, синхронные или асинхронные, будут использоваться.
Синхронные двигатели должны выбираться для компактного размера конструкции, низкого момента инерции ротора и следовательно, максимальной динамической характеристики.
Асинхронные двигатели могут использоваться для увеличения макс. скоростей в диапазоне ослабления поля. В распоряжении также имеются асинхронные двигатели для более высоких мощностей.
Также точно определите, будет ли приводы управляться как одноосные или как группа многоосных приводов.
Во время конфигурации исключительно важны следующие факторы:
- Тип питание от сети, если используются специальные типы двигателей и/или сетевые фильтры в IT-системах (негруппированные системы)
- Использование двигателя в соответствии с номинальными значениями для температур обмотки 60 К или 100 К
- Температура окружающей среды и высота инсталляции двигателей и компонентов привода
Другие граничные условия применяются, если привода интегрируются в окружение автоматизации, такую как SIMATICили SIMOTION.
Для управления движением и технологических функций (например, позиционирования), а также для синхронных функций, используется соответствующая система автоматизации, например, SIMOTION D.
Приводы соединяются с высокоуровневой системой автоматизации через PROFIBUS.
3. Определение цикла нагрузки, расчет макс. нагружающего момента, определение двигателя
Специфические моторные предельные кривые обеспечивают базу для определения двигателей.
Эти кривые описывают рабочую характеристику по скорости и принимают в расчет пределы двигателя, основанные на напряжении сети и функции источника питания (сетевые модули Smartили Active).
Предельные кривые для синхронных двигателей (пример)
Двигатель определяется на базе цикла нагрузки, который задается использованием. Для различных циклов нагрузки должны использоваться различные характеристики. Необходимо определить следующие рабочие сценарии:
- Рабочие циклы с постоянным периодом состояния "включено"
- Рабочие циклы с переменным периодом состояния "включено"
- Свободный рабочий цикл
Цель – идентифицировать характеристику рабочих точек момента вращения и скорости, на основе которых двигатель может быть определен как подходящий для каждого цикла нагрузки.
Когда рабочий сценарий определен и специфицирован, рассчитывается макс. двигательный момент. Вообще говоря, это происходит во время фазы ускорения. Крутящий момент нагрузки и момент вращения, необходимые для ускорения двигателя, складываются вместе.
Затем макс. двигательный момент подтверждается предельными кривыми двигателя.
При определении двигателя в расчет должны приниматься следующие критерии:
- Должны соблюдаться динамические границы, т.е. все точки скорости-момента цикла нагрузки должны лежать ниже релевантной предельной кривой.
- Должны соблюдаться температурные границы, т.е. для синхронных двигателей среднеквадратический двигательный момент при средней скорости двигателя, получающейся из рабочего цикла, должен лежать ниже кривой S1 (непрерывный режим). Для асинхронных двигателей среднеквадратический объем тока двигателя в течение рабочего цикла должен быть меньше, чем номинальный ток двигателя.
- Следует заметить, что макс. допустимый двигательный момент на синхронных двигателях при больших скоростях уменьшается в результате предельной кривой напряжения. Кроме того, должно соблюдаться изоляционное расстояние в 10% от предельной кривой напряжения, чтобы предохранить от флуктуаций напряжения.
- Если используются асинхронные двигатели, то допустимый двигательный момент в диапазоне поля ослабления сокращается в результате предела устойчивости. Должно соблюдаться изоляционное расстояние в 30%.
- Если используются абсолютный датчик, то номинальный момент вращения двигателя сокращается на 10% из-за температурных границ датчика.
Рабочие циклы с постоянным периодом состояния "включено"
Рабочие циклы с постоянным периодом состояния "включено" ставят специальные требования к рабочим характеристикам, как, например, функция скорости, например, M = константа, M ~ n2, M ~ nили = константа.
Эти приводы обычно работают на стационарной рабочей точке. Применяется задание размеров базовой нагрузки. Крутящий момент базовой нагрузки должен лежать ниже кривой S1.
В случае кратковременных перегрузок (например, во время запуска) применяется задание размеров перегрузки. Пиковый крутящий момент должен лежать ниже предельной кривой напряжения для синхронных двигателей или ниже предела устойчивости для асинхронных двигателей.
В итоге, задание размеров выглядит следующим образом:
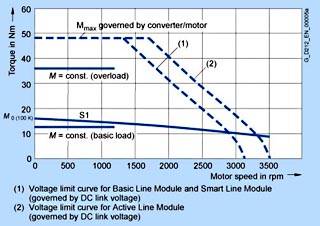
Выбор двигателей для рабочих циклов с постоянным периодом состояния "включено" (пример)
Рабочие циклы с переменным периодом состояния "включено"
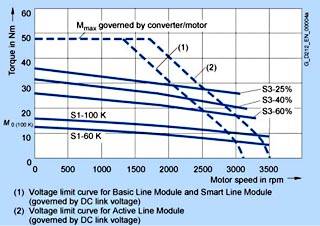
Так же как непрерывный режим (S1), стандартизованные типы периодических режимов (S3) определены для рабочих циклов с переменным периодом состояния "включено". Режим S3 – это операция, которая содержит в себе последовательность похожих циклов, каждый из которых содержит время с постоянной нагрузкой и прерывание.
Режим S1 (непрерывное действие)
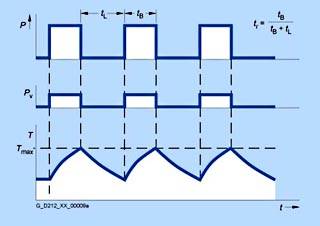
Режим S3 (периодический режим без воздействия на процедуру запуска)
Заданные переменные обычно используются для относительного периода состояния "включено":
- S3 – 60%
- S3 – 40%
- S3 – 25%
Для этих спецификаций подготавливаются соответствующие характеристики двигателя. Нагружающий момент должен лежать ниже соответствующей температурной предельной кривой двигателя. Для рабочих циклов с переменными периодами состояния "включено" принимается в расчет задание размеров перегрузки.
В итоге, определение двигателя выглядит следующим образом:
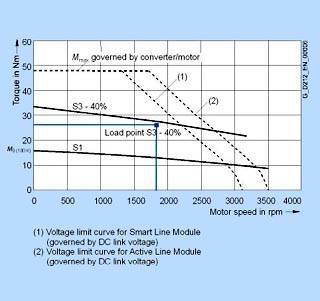
Выбор двигателей для рабочих циклов с переменным периодом состояния "включено" на примере синхронного двигателя
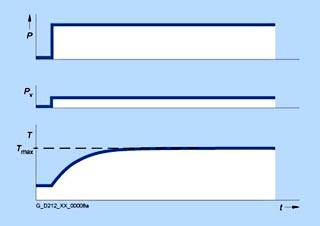
Свободный рабочий цикл
Свободный рабочий цикл определяет ход скорости двигателя и момента вращения по прошествии времени
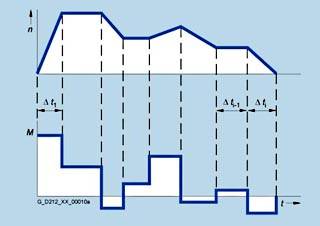
Нагружающий момент устанавливается для каждого промежутка времени. Вдобавок к нагружающему моменту, средний момент инерции нагрузки и момент инерции двигателя должны приниматься во внимание для ускорения. Может быть необходим момент вращения трения, который работает в противоположном направлении движения.
Передаточное число и эффективность зубчатой передачи должны приниматься во внимание, когда вычисление вращающего момента нагрузки и/или ускорения обусловлено двигателем. Повышенное передаточное число увеличивает точность позиционирования на основе разрешения датчика. При данном разрешении датчика двигателя, по мере того как передаточное число растет, следует раскрыть разрешение позиции станка.
Больше информации о важности редуктора см. описание двигателя.

Среднеквадратический вращающий момент Mrms должен лежать ниже кривой S1.
Максимальный вращающий момент Mmax достигается во время процесса ускорения и должен лежать ниже предельной кривой напряжения для синхронных двигателей и ниже предела устойчивости для асинхронных двигателей.
В итоге, задание размеров выглядит следующим образом:
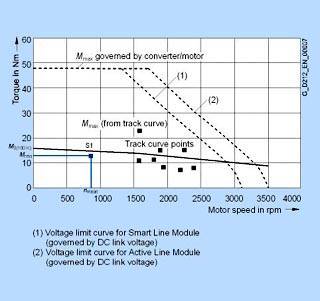
Выбор двигателей на базе свободного рабочего цикла (пример)
Выбор двигателя
Теперь возможно определить двигатель, который точно соответствует условиям работы.
Следующий шаг, который необходимо выполнить, это проверить, поддерживаются ли температурные границы. Для этого нужно рассчитать ток двигателя при базовой нагрузке. Для конфигурации, основанной на рабочем цикле с постоянным периодом состояния "включено", нужно рассчитать ток перегрузки, исходя из требуемого вращающего момент перегрузки. Правила расчета для этой цели зависят от типа используемого двигателя (синхронный, асинхронный двигатель) и рабочего сценария (рабочие циклы с постоянным/переменным периодом состояния "включено", свободный рабочий цикл).
В заключение должны определяться другие характеристики двигателя. Это делается путем конфигурирования опций двигателя (см. Описание двигателя).
4. Определение моторного модуля SINAMICS S120
Моторные модули могут быть назначены двигателю на основе их номинальной выходной мощности и пикового тока. Моторный модуль назначается синхронным двигателям на базе тока покоя I0100 K (номинальный ток для температуры обмотки 100 К), а асинхронным двигателям – на базе номинального тока Irated, и перечислены в описании двигателя. Для оптимальной конфигурации рассчитанный ток двигателя наносится на моторный модуль. Точный расчет поддерживается SIZER.
В зависимости от окружающих условий (высота инсталляции, температура окружающей среды) выходной ток моторных модулей, возможно, необходимо будет уменьшить (см. Описание компонентов).
Ток двигателя, рассчитанный на базе типа двигателя (синхронный, асинхронный двигатель) и рабочего сценария (рабочие циклы с постоянным/переменным периодом состояния "включено", свободный рабочий цикл), используется для определения размеров моторных модулей:
I
rated, Motor Module ≥ Iload
Увеличенный выходной ток может быть затребован из моторных модулей на конкретный период времени. В случае конфигурации перегрузки должно быт верно следующее:
I
rated, Motor Module × коэффициент перегрузки< Ioverload
Коэффициент перегрузки = Отношение Irated/Imax, принимая во внимание рабочие циклы (см. Описание компонентов).
Моторные модули могут использоваться как однодвигательные модули и, в определенных пределах тока, как двухдвигательные.
5. Повторение шагов 3 и 4 для дополнительных осей
Двигатели и моторные модули должны быть рассчитаны для всех осей.
6. Расчет необходимой мощности постоянного тока и определение сетевого модуля SINAMICS S120
В использованиях с многоосным приводом число моторных модулей управляется общей сетью постоянного тока, которая питается энергией сетевого модуля.
Теперь определяем, какой сетевой модуль – Smart или Active – должен использоваться. Это зависит от имеющихся диапазонов мощностей сетевых модулей и от того, будет ли DCсетевое напряжение нерегулируемое и поэтому зависимое от сетевого напряжения (сетевой модуль Smart), или же регулируемое (сетевой модуль Active) при постоянном напряжении сети DCв 600В или 625В (в зависимости от сетевого напряжения до 3 AC 415 В → DC 600 В, 3 AC 416 В до 440 В → DC 625 В, свыше 3 AC 440 В → зависимое от сетевого напряжения).
При определении сетевого модуля принимается во внимание мощность, необходимая для каждой оси.
При расчете необходимой DC сетевой мощности в расчет должны приниматься рабочий сценарий и тип двигателя:
- Для асинхронных двигателей, параметры которых заданы для рабочих циклов с переменным периодом состояния "включено", номинальная мощность двигателей равна необходимой DC сетевой мощности.
- Для синхронных двигателей, параметры которых заданы для рабочих циклов с переменным периодом состояния "включено", необходимая DC сетевая мощность равна расчетной мощности × отношение токов быстрого и медленного плавления. На необходимую DC сетевую мощность может влиять отношение токов быстрого и медленного плавления (под нагрузкой к номинальной скорости). Эмпирические величины для отношения токов:
|
Использование
|
Отношение токов ñ/nrated
|
|
Синхронные двигатели/приводы подачи для
малооборотных приводов
|
0.4 to 0.7
|
|
приводы роботов для скоростных приводов
|
0.9 to 1
|
|
Асинхронные/приводы главного шпинделя с
двигателями 1FTи 1PH7
|
1
|
- Для асинхронных и синхронных двигателей, параметры которых заданы на базе рабочих циклов с постоянным периодом состояния "включено" или, соответственно, свободных рабочих циклов, мощность в рабочей точке двигателя или среднеквадратическая мощность, принимаемая в расчет эффективность двигателя и моторного модуля, используется как необходимая DC сетевая мощность.
Общие расчетные параметры Pcalc для отдельных двигателей, скорректированные по коэффициенту одновременности и среднему отношению скоростей, дают основу для выбора типовых параметров сетевого модуля.
Расчетная мощность для синхронных двигателей
Pcalc VSA = 0.105 × M0 × nrated × 10-3
Pcalc VSA = Расчетная мощность для синхронных двигателей в кВт
0.105 = Factor 2 × π/60
M
0 = вращающий статический момент в Нм
n
rated = номинальная скорость в об/мин
Расчетная мощность для асинхронных двигателей
Pcalc HSA = 1.45 × Pmotor shaft HSA
P
calc HSA = 1.25 × Pmotor shaft HSA
P
calc HSA = сетевая мощность для привода постоянной мощности в кВт
1.45 или 1.25 = коэффициент, учитывая эффективность двигателя
P
motor shaft HSA = Механическая энергия, использованная на вале двигателя в кВт
Номинальное входное электропитание для сетевых модулей основано на сетевом напряжении 380 В. Если сетевое напряжение меняется, это может отразиться на выходной мощности сетевых модулей. Впрочем, это не может превысить номинальную мощность.
В зависимости от окружающих условий (высота установки, температура окружающей среды) номинальное входное питание сетевых модулей, возможно, необходимо будет уменьшить (см. Описание компонентов).
Чтобы оптимизировать задание размеров сетевого модуля, циклические характеристики момента вращения должны учитываться для отдельных осей. Предполагается, что асинхронные двигатели используются как главные приводы/главные шпиндели и поэтому находятся в постоянной длительной работе. Синхронные двигатели используются для циклических последовательностей (например, оси подачи) – они не работают постоянно.
Коэффициент одновременности принимает в расчет циклическую характеристику момента вращения для каждой отдельной оси.
Эмпирические величины для коэффициента одновременности:
|
Оси подачи на каждый ряд
|
Коэффициент одновременности K на каждый ряд
|
|
1
|
1
|
|
2
|
0.63
|
|
3
|
0.5
|
|
4
|
0.38
|
|
5
|
0.33
|
|
6
|
0.28
|
Чтобы предотвратить ошибочные конфигурации на осях с очень разными номинальными мощностями, оси распределяются по категориям класса мощности на базе их мощности.
Эти классы могут использоваться в качестве базы для задания размеров сетевого модуля согласно следующей процедуре:
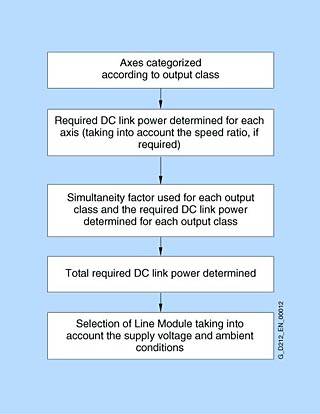
Эта схема отражена ниже в таблице-конфигураторе.
Запись конфигурации для упрощенного расчета DC сетевой мощности PZ
|
Оси
|
Заказной номер двигателя
|
n
rated
|
M
|
I
rated
|
I
O
(модуль двигателя)
|
P
calc VSA
|
ñ/n
rated
|
P
calc VSA
(ñ/nrated)
|
|
|
|
об/мин
|
Нм
(фунтf-фут)
|
A
|
A
|
кВт
(л.с.)
|
|
кВт
(л.с.)
|
|
Диапазон I от 0 кВт (0 л.с.) до 1.8 кВт (2.5 л.с.)
|
|
1
|
|
|
|
|
|
|
|
|
|
2
|
|
|
|
|
|
|
|
|
|
3
|
|
|
|
|
|
|
|
|
|
4
|
|
|
|
|
|
|
|
|
|
5
|
|
|
|
|
|
|
|
|
|
6
|
|
|
|
|
|
|
|
|
|
Всего PcalcVSA диапазон I →
|
|
|
Диапазон II от 1.8 кВт (2.5 л.с.) до 8.8 кВт (12 л.с.)
|
|
1
|
|
|
|
|
|
|
|
|
|
2
|
|
|
|
|
|
|
|
|
|
3
|
|
|
|
|
|
|
|
|
|
4
|
|
|
|
|
|
|
|
|
|
5
|
|
|
|
|
|
|
|
|
|
6
|
|
|
|
|
|
|
|
|
|
Всего PcalcVSA диапазон II →
|
|
|
Диапазон III от 8.8 кВт (12 л.с.) до 31 кВт (42 л.с.)
|
|
1
|
|
|
|
|
|
|
|
|
|
2
|
|
|
|
|
|
|
|
|
|
3
|
|
|
|
|
|
|
|
|
|
4
|
|
|
|
|
|
|
|
|
|
5
|
|
|
|
|
|
|
|
|
|
6
|
|
|
|
|
|
|
|
|
|
Всего PcalcVSA диапазон III →
|
|
|
Диапазон IV от 31 кВт (42 л.с.) до 50 кВт (67 л.с.)
|
|
1
|
|
|
|
|
|
|
|
|
2
|
|
|
|
|
|
|
|
|
3
|
|
|
|
|
|
|
|
|
4
|
|
|
|
|
|
|
|
|
5
|
|
|
|
|
|
|
|
|
6
|
|
|
|
|
|
|
|
|
Всего PcalcVSA диапазон IV →
|
|
|
Диапазон V от 50 кВт (67 л.с.) до 75 кВт (100 л.с.)
|
|
1
|
|
|
|
|
|
|
|
|
2
|
|
|
|
|
|
|
|
|
3
|
|
|
|
|
|
|
|
|
4
|
|
|
|
|
|
|
|
|
5
|
|
|
|
|
|
|
|
|
6
|
|
|
|
|
|
|
|
|
Всего PcalcVSA диапазон V →
|
|
|
Диапазон VI от 75 кВт (100 л.с.) до 150 кВт (201 л.с.)
|
|
1
|
|
|
|
|
|
|
|
|
2
|
|
|
|
|
|
|
|
|
3
|
|
|
|
|
|
|
|
|
4
|
|
|
|
|
|
|
|
|
5
|
|
|
|
|
|
|
|
|
6
|
|
|
|
|
|
|
|
|
Всего PcalcVSA диапазон VI →
|
|
|
Всего PcalcVSA
|
|
Коэффициент одновременности
|
|
|
|
P
Z VSA
кВт (л.с.)
|
|
Диапазон I
|
K
I
|
|
|
|
|
×
|
|
=
|
|
|
Диапазон II
|
K
II
|
|
+
|
|
|
×
|
|
=
|
|
|
Диапазон III
|
K
III
|
|
+
|
|
|
×
|
|
=
|
|
|
Диапазон IV
|
K
IV
|
|
+
|
|
|
×
|
|
=
|
|
|
Диапазон V
|
K
V
|
|
+
|
|
|
×
|
|
=
|
|
|
Диапазон VI
|
K
VI
|
|
+
|
|
|
×
|
|
=
|
|
|
Всего →
|
x 1.1 =
|
|
Следующие коэффициенты также должны учитываться при задании параметров DC сети:
Если потери устройства важны в работе двигателя с приводом, то задание размеров для работы мотора-привода также имеют значение для регенеративного действия. Для работы тормоза двигателя проверьте, чтобы энергия, восстановленная в DC сети, не превышала допустимую пиковую мощность сетевого модуля:
Рекуперация пиковой электроэнергии ≤ 0.9 × (общая мощность всех осей).
В случае повышенных номинальных значений рекуперации энергии и преодолеваемых рабочих сценариев "повреждения сети" тормозной модуль должен быть в состоянии готовности либо сетевой модуль – с избыточным размером либо регенерация энергии должна быть сокращена посредством увеличенного времени торможения.
Для конфигурации рабочего сценария "АВАРИЙНЫЙ ОСТАНОВ" либо сетевой модуль должен быть с избыточным размером либо должен использоваться дополнительный тормозной модуль, с тем, чтобы энергия DC сети могла быть рассредоточена как можно быстрее.
-
• Контроль емкостного сопротивления сети DС
Во время включения питания сетевые модули ограничивают ток нагрузки к конденсаторам DC сети. Макс. допустимое емкостное сопротивление DC сети не должно превышать следующие макс. емкостные сопротивления DC сети в группе приводов вследствие ограничений подпитывающего входного контура: сетевые модули Smart 5 и 10 кВт (6.5 л.с. и 13.5 л.с.) макс. 6 мФ и все остальные сетевые модули от 16 до 120 кВт (21.5 л.с. и 160 л.с.) макс. 20 мФ.
Вы должны обеспечить, чтобы эти емкостные сопротивления DC сети в группе приводов не превышались. Значения для емкостных сопротивлений DC сети компонентов указаны в описаниях компонентов для SINAMICS S120
-
Предварительно заряженная частота DC сети
Предварительно заряженная частота DC сети через сетевой модуль рассчитывается с использованием следующей формулы:

-
Специальные условия для работы сетевого модуля Smart
Сетевые модули Smart дают более низкое напряжение DC сети, чем сетевые модули Active. Из этого вытекают следующие дополнительные условия:
- Если эксплуатируются асинхронные двигатели, то нижний максимум мощности двигателя возможен при высоких скоростях при таком же сетевом напряжении.
- Для синхронных двигателей снижение динамических характеристик привода должно рассчитываться при высоких скоростях.
- • Для синхронных двигателей, если необходима перегрузка, номинальная скорость двигателя не используется.
7. Спецификация опций со стороны сети (главный выключатель, плавкие вставки, сетевые фильтры и т.п.)
Для конфигурации привода рекомендуются следующие опции со стороны сети:
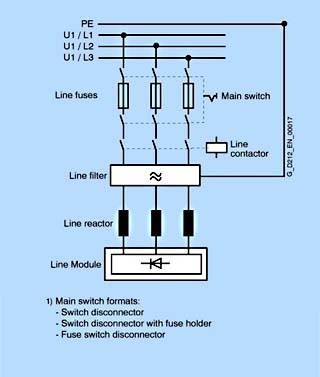
Главный выключатель может иметь различные форматы:
- Главный и аварийный выключатель EMERGENCY STOP + разъединитель выключателя с плавкой вставкой (с направляющим сигналом через блок-контакт для режима размыкания)
- Прерыватель нагрузки с плавкими вставками
- Автоматический выключатель.
Линейный контактор может использоваться, например, если привод должен быть отсоединен от сетевого питания в случае неисправности или для дистанционного отключения. Следуйте инструкциям в руководствах по проектированию SINAMICS S120, чтобы блокировать линейный контактор в контексте функций безопасности.
Сетевой фильтр должен использоваться в TN системах для уменьшения линейных гармоник.
Сетевой реактор необходим всегда. С сетевыми модулями Active он абсолютно необходим для работы повышающего преобразователя. С сетевыми модулями Smart он должен использоваться для уменьшения линейных гармоник и обеспечения защиты от зашкаливаний высокого тока.
Примечание:
Подходящими устройствами утечки на землю, обеспечивающими защиту от опасных поражающих токов, должны быть оснащены все силовые преобразователи с трехфазным мостиковым соединением (B6). Сетевые модули SINAMICS подходят для непосредственной работы на AC/DC-чувствительных, селективных автоматических выключателях остаточного тока. Асимметричный ввод и вывод задерживает поток, вызванный главным выключателем, а сопутствующий поток электрического смещения и импульсный ток означают, что должны использоваться автоматические выключатели остаточного тока с характеристиками селективного предохранителя (например, 5SZ6468-0KG00, номинальный ток 63 A; номинальный ток повреждения 300 мA).
Там, где используются силовые преобразователи PWM, особенно в соединении со средствами измерения ЭМС (такими как экранированные кабели двигателя), могут образовываться высокие токи утечки. Сетевые фильтры, назначенные сетевым модулям Active 16 кВт (21.5 HP) и 36 кВт (48 HP), будут ограничивать токи утечки до уровня ниже 150 мA.
В качестве альтернативы так же можно использовать разделительный трансформатор в сочетании с другими средствами защиты от опасных токов утечки.
8. Спецификация необходимой эффективности управления и выбор блока управления SINAMICS S120, определение компонентной разводки кабелей
Блок управления CU320 разработан для регулирования группы приводов. Он обеспечивает функции управления для приводов (моторные модули, сетевой модуль) и системных компонентов. Нагрузка на блок управления будет изменяться в зависимости от числа и динамической характеристики, требуемой от отдельных приводов. Для оценки нагрузки должны использоваться следующие данные:
|
Серво
|
Нагрузка
|
|
1-я ось
|
26%
|
|
Каждая дополнительная ось
|
13%
|
Каждая указанная номинальная нагрузка включает в себя использования центральной коммуникации.
Должен применяться 1% нагрузки, если используется клеммный модуль.
|
Полная нагрузка
|
Необходимые компоненты
(в дополнение к блоку управления)
|
|
≤ 55%
|
CompactFlash Card без расширения мощности
|
|
> 55% to ≤ 100%
|
CompactFlash Card с расширением мощности 1
|
|
> 100%
|
Требуется дополнительный блок управления CU320 и CompactFlash Card
|
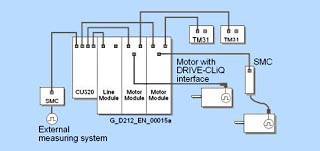
Компонентная разводка кабелей с DRIVE-CLiQ
Компоненты взаимодействуют друг с другом через стандартный интерфейс DRIVE-CLiQ. Этот интерфейс соединяет блок управления с силовыми компонентами, датчиками и другими системными компонентами, например, клеммными модулями. Заданные и действительные значения, команды управления, сообщения о состоянии и данные таблички с техническими данными передаются через DRIVE-CLiQ.
Для электропроводки компонентов с DRIVE-CLiQ применяются следующие правила:
- К розетке DRIVE-CLiQ на блоке CU320 можно подсоединить макс. 16 узловых точек.
- В сеть можно соединить макс. 7 узловых точек. Сеть всегда рассматривается с перспективы блока управления.
- Круговая проводка не допускается.
- Компоненты не должны соединяться двумя проводами.
Помимо всего прочего моторный датчик должен быть соединен с соотнесенным моторным модулем.
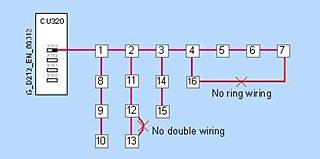
Электропроводка DRIVE-CLiQ компонентов
Следующие примеры иллюстрируют гибкость электропроводки DRIVE-CLiQ.
Пример сетевой топологии для стандартных решений
Пример древовидной топологии для высокопроизводительных решений, например, высокодинамичная ось в группе прямого управления движением, выборочный доступ к отдельной оси/группировкам осей для техобслуживания и т.п.
Силовые компоненты используются с соответствующим соединительным кабелем DRIVE-CLiQ для связи со смежным модулем привода в цепочке (сетевая топология). Сборные кабели DRIVE-CLiQ различной длины до 100 м (328 футов) имеются в наличии для связывания моторных датчиков, прямых датчиков, клеммных модулей и т.д.
9. Определение дополнительных системных компонентов
Сенсорные модули
Сигнальная связь различных датчиков (инкрементный датчик sin/cos 1 Vpp, абсолютный датчик, резольвер) с интерфейсом DRIVE-CLIQ происходит с помощью сенсорных модулей. В зависимости от измерительной системы могут использоваться сенсорные модули SMC10, SMC20 или SMC30. Сенсорные модули подходят для монтажа на шинах DIN. Они также используются для согласования сигналов внешних (станочных) датчиков.
Для некоторых типов двигателей определение датчика встраивается в двигатели как стандарт. Эти двигатели соединены проводами непосредственно с использованием DRIVE-CLiQ (в дополнение к силовому соединению). Обычного согласования сигналов больше не требуется; также не требуется сенсорный модуль.
Модули расширения
Блок управления CU320 содержит в себе I/O и интерфейсы для коммуникации. SINAMICS S120 предлагает следующие модули расширения:
- TB30 Клеммная панель (клеммное расширение для вставки в опционное гнездо на блоке управления CU320)
- CBC10 Комуникационная панель (интерфейс привода CANopen для вставки в опционное гнездо на блоке управления CU320)
- TM31 Клеммный модуль (клеммное расширение для связи через DRIVE-CLiQ)
Должны учитываться следующие критерии, если вы используете модули расширения:
- Только опционная панель может быть вставлена в опционное гнездо на блоке управления CU320.
- Группа привода может управлять макс. 8 клеммными модулями.
Тормозной модуль
Тормозной модуль должен использоваться для останова приводов в случае сбоя сети или "АВАРИЙНОГО ОСТАНОВА", т.к. в этих рабочих сценариях энергия торможения больше не может быть регенерирована в сеть или не может быть регенерирована достаточно быстро.
Тормозные модули могут связываться параллельно для увеличения тормозного усилия.
Максимальное количество тормозных модулей в группе привода зависит от емкостного сопротивления DC сети рассматриваемой конфигурации привода. Один тормозной модуль может использоваться для каждого полного 0.5 мФ емкостного сопротивления DC сети.
Если емкостного сопротивления DC сети недостаточно для работы числа тормозных модулей, то для его увеличения могут использоваться конденсаторные модули. Должно учитываться максимально допустимое емкостное сопротивление DC сети группы привода на сетевом модуле. Максимальное емкостное сопротивление DC сети, учитываемое для предварительной зарядки ограничения тока на сетевых модулях, перечислено в технических данных для сетевых модулей.
Тормозной резистор снимает избыточную энергию с DC сети:
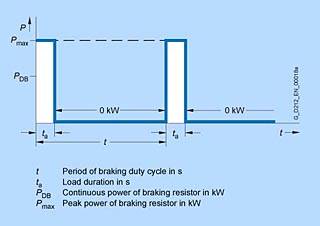
Рабочий цикл для тормозных резисторов
Конденсаторные модули
Конденсаторные модули используются для увеличения емкостного сопротивления DC сети для буферизования кратковременных потерь мощности. Если емкостного сопротивления DC сети недостаточно для использования одного или некоторого числа тормозных модулей, то каждый конденсаторный модуль может увеличить ее на 4 мФ.
Модуль регулирования питания
Модуль регулирования питания обеспечивает 24 В DC электроснабжение через сеть или DC сеть для поддержания питания компонентов в случае сбоя сети. Это делает возможным, например, выполнить действия аварийного отвода в случае сбоя питания сети.
10. Расчет требований тока для источника питания постоянного тока 24 В для компонентов и спецификация источников питания (источник питания SITOP, модули регулирования питания)
Сетевые модули, моторные модули, опционные модули и другие системные компоненты должны обеспечиваться 24 В DC напряжением через электронный источник питания, доступный внешне, или через модули регулирования питания. Сетевые и моторные модули имеют встроенные 24 В DC шинопроводы для 24 В DC напряжения, а другие компоненты имеют клеммы.
Источники питания SITOP, имеющиеся в виде модульного решения для 20А и 40А, используются для обеспечения внешнего 24 В DC электропитания.
Определение модуля электропитания, используемого внешне
Существующие требования перечислены в таблице ниже:
|
Модули
|
Требования тока DC 24В
A
|
|
Блок управления CU320
|
|
|
0.8
|
|
|
макс. 0.5
тип. 0.1
|
|
|
макс. 0.15
|
|
Дополнительные системные компоненты
|
|
|
< 0.1
|
|
|
макс. 0.5
тип. 0.1
|
|
|
тип. 0.2
|
|
|
макс. 0.5
тип. 0.1
|
|
Сетевые модули Smart
|
|
|
1.0
|
|
|
1.3
|
|
Сетевые модули Active
|
|
|
1.0
|
|
|
1.4
|
|
|
1.7
|
|
|
2.0
|
|
|
2.5
|
|
Однодвигательные модули
|
|
|
0.8
|
|
|
тип. 0.25
|
|
|
тип. 0.4 дo 1.1
|
|
|
0.8
|
|
|
тип. 0.25
|
|
|
тип. 0.4 дo 1.1
|
|
|
0.85
|
|
|
тип. 0.25
|
|
|
тип. 0.4 дo 1.1
|
|
|
0.85
|
|
|
тип. 0.25
|
|
|
тип. 0.4 дo 1.1
|
|
|
0.9
|
|
|
тип. 0.25
|
|
|
тип. 0.4 дo 1.1
|
|
|
1.2
|
|
|
тип. 0.25
|
|
|
тип. 0.4 дo 2.0
|
|
|
1.2
|
|
|
тип. 0.25
|
|
|
тип. 0.4 дo 2.0
|
|
|
1.5
|
|
|
тип. 0.25
|
|
|
макс. 2.0
|
|
|
1.5
|
|
|
тип. 0.25
|
|
|
макс. 2.0
|
|
|
1.5
|
|
|
тип. 0.25
|
|
|
макс. 2.0
|
|
Двухдвигательные модули
|
|
|
1.0
|
|
|
тип. 0.5
|
|
|
тип. 0.8 дo 2.2
|
|
|
1.0
|
|
|
тип. 0.5
|
|
|
тип. 0.8 дo 2.2
|
|
|
1.0
|
|
|
тип. 0.5
|
|
|
тип. 0.8 дo 2.2
|
|
|
1.0
|
|
|
тип. 0.5
|
|
|
тип. 0.8 дo 2.2
|
|
Тормозной модуль
|
|
|
0.5
|
|
Сенсорные модули
|
|
|
тип. 0.25
|
|
|
тип. 0.25
|
|
|
тип. 0.33
|
Расчет выполняется с использованием следующей формулы:
∑ [CU320 + TB30 + CBC10 + сетевой модуль + ∑ (моторные модули + SMCxx + тормозной сигнал мотора)]
Другие системные компоненты (например, линейный контактор) также должны учитываться.
Предельные значения для конфигурации:
- Макс. пропускная способность тока встроенного 24 В DC шинопровода 20А.
- В случае повышенных требований к току количество 24 В DC источников питания должно обеспечивать одну группу привода. Дополнительные источники питания обеспечиваются с использованием 24 В клеммных адаптеров.
- Поперечные сечения кабеля до 2.5 мм² могут соединяться с блоком управления, клеммными панелями, клеммными и сенсорными модулями.
- Поперечные сечения кабеля до 6 мм² могут соединяться с 24 В клеммными адаптерами для сетевых и моторных модулей.
- Внешний источник питания 24 В DC используется только для компонентов SINAMICS и непосредственных нагрузок.
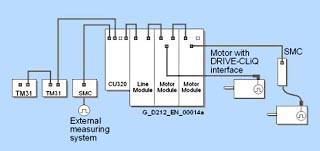
11. Спецификация компонентов для системы связи
Чтобы укомплектовать систему привода, такие компоненты как двигатели и датчики должны соединяться кабелями.
Для двигателей с интерфейсом DRIVE-CLiQ источник питания DC 24 В обеспечивается через кабели DRIVE-CLiQ. На всех других сенсорных модулях должен обеспечиваться отдельный источник питания DC 24 В .
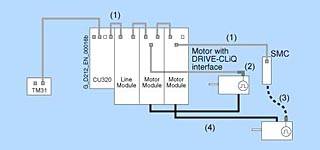
Система связи системы привода
|
Легенда
|
Кабель
|
Описание
|
|
(1)
|
Кабели DRIVE‑CLiQ
|
Стандартные кабели для внутришкафной конфигурации без 24В магнитопроводов
|
|
(2)
|
Кабели DRIVE‑CLiQ MOTION‑CONNECT 500/800
|
Экранированные кабели MOTION-CONNECT 500 для стационарной установки (например, в кабельных каналах), и MOTION-CONNECT 800 для гибкой установки (например, в кабельных цепочках) с 24 В магнитопроводами
|
|
(3)
|
Сигнальные кабели MOTION‑CONNECT 500/800
|
Подходят для рассматриваемой системы измерения; в версиях MOTION-CONNECT 500 экранированные кабели для стационарной установки (например, в кабельных каналах), и MOTION-CONNECT 800 для гибкой установки (например, в кабельных цепочках)
|
|
(4)
|
Силовые кабели MOTION‑CONNECT 500/800
|
Экранированные кабели MOTION-CONNECT 500 для стационарной установки (например, в кабельных каналах) и MOTION-CONNECT 800 для гибкой установки (например, в кабельных цепочках)
|
12. Конфигурация компонентов группы привода
Группа привода SINAMICS S включает в себя сетевой модуль, моторные модули, компоненты DC сети, блок управления и опционно модули расширения.
При выборе конфигурации группы привода должны учитываться следующие критерии:
- Сетевой модуль должен всегда располагаться слева как первый модуль.
- На каждую группу разрешается только один сетевой модуль.
- Количество групп привода должно быть сконфигурировано для источников питания, которые не могут быть обеспечены самым высоким номинальным значением.
- Моторные модули должны располагаться возле сетевого модуля в порядке убывания номинального тока слева направо (самый высокий номин. ток слева, самый низкий – справа). Вследствие возросших токов моторные модули с шириной корпуса 300 мм имеют шинопроводы DC сети с увеличенным поперечным сечением. В группе привода следует обеспечить, чтобы шинопроводы DC сети соответствовали требованиям пропускной способности тока для связанных моторных модулей.
- Для многозвенных цепей привода могут использоваться сетевые адаптеры.
- Группы привода должны быть сконфигурированы таким образом, чтобы общая длина всех силовых кабелей (моторных и сетевых) в каждой отдельной группе, которые предпочтительно должны быть экранированы, была ≤ 350 м (1148 футов).
Дополнительные критерии для использования тормозного модуля:
- • Тормозной модуль обычно размещается справа, рядом с самым маленьким моторным модулем. Это очень важно в тех случаях, когда группа привода включает в себя количество очень похожих моторных модулей.
- • В случае неравномерного распределения энергии, например, если высокомощные моторные модули используются в связке с такими же маломощными, тормозной модуль должен устанавливаться между моторными модулями, чьи номинальные мощности отличаются максимально, т.к. поперечные сечения шинопроводов DC сети будут изменяться на основе измерений вследствие пропускной способности тока встроенных шинопроводов DC сети.
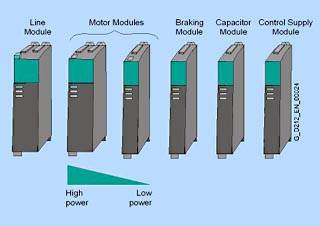
Расположение моторных модулей на базе мощности
- Позиция установки блока управления гибкая. Возможны следующие опции конфигурации:
- "Стыковка" на левой стороне сетевого модуля
- Непосредственное размещение рядом с группой привода на монтажной плате
- Установка в других местах шкафа, с учетом допустимой длины кабеля DRIVE-CLiQ.
- ДОЛЖЕН соблюдаться следующий минимум необходимых вентилируемых пространств для компонентов:
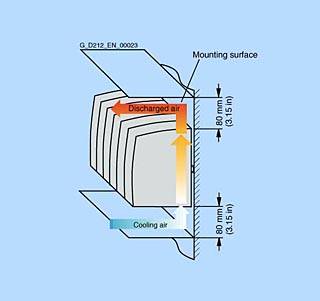
Вентилируемые пространства для компонентов книжного формата
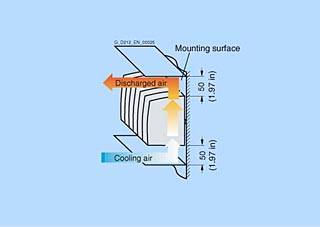
Вентилируемые пространства для сенсорных и клеммных модулей
- Если установлено на задней панели, то сетевые стабилизаторы и сетевые фильтры требуют вентилируемого пространства на 100 мм выше и ниже соответственно.
| 



